
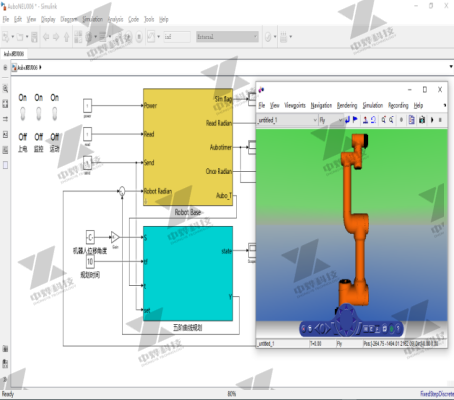

产品概述:开源六轴协作机械臂系统是由六轴机械臂本体、控制系统、上位机和稳压电源组成。每个机械臂关节由谐波减速机、力矩电机、高精度绝对值编码器、高精度增量式光电编码器和伺服驱动器组成。驱动控制系统是基于MATLAB/Simulink开发。机械臂系统使用完全自主研发的关节驱动器及运动控制器,为教学和科研提供优越的开放性支撑。
产品概述
开源六轴协作机械臂系统是由六轴机械臂本体、控制系统、上位机和稳压电源组成。每个机械臂关节由谐波减速机、力矩电机、高精度绝对值编码器、高精度增量式光电编码器和伺服驱动器组成。驱动控制系统是基于MATLAB/Simulink开发。机械臂系统使用完全自主研发的关节驱动器及运动控制器,为教学和科研提供优越的开放性支撑。
系统控制算法代码开源,提供丰富的运动学、动力学控制实验以及伺服电机控制实验案例,如正逆运动学实验、关节空间轨迹规划算法实验、笛卡尔空间轨迹算法实验、单双关节PID动力学算法实验、单关节自适应控制算法实验以及单双关节零力拖动实验等。该系统既可以作为自动化专业、机器人专业、机械电子专业、智能制造专业、机械工程专业中相关如《机器人学导论》、《机器人控制技术》、《计算机控制技术》、《电机与伺服控制》、《机器人伺服驱动技术》、《机器人机电一体化技术》、《机器人操作系统》 等课程的配套实验实践平台,也同时支撑相关专业和课程的运动学、动力学及伺服驱动算法的科研平台。
产品特点
1.开源成熟工业机械臂产品为实验载体,支撑机器人建模仿真、机器人学、机器人控制、机器人动力学等教学实验,以及科研领域的算法验证实验和振动分析的控制实验等。
2.伺服性能优良,重复定位精度高,机械臂模块化设计,易于安装,人机交互友好,使用便捷。
3.控制系统采用MATLAB/Simulink软件进行编程,用户可以更好更便捷地研究控制算法,并可支撑更高级的控制算法验证。
4.控制系统采用双CAN总线通讯,对于不同的机械臂本体,最短控制周期可以达到1.5ms。
5.提供交流伺服驱动器的电流、速度、位置三闭环的伺服控制方法、以及梯形加减速、CAN总线通讯等运动控制算法。
6.支撑零力拖动等高级动力学算法和机器人关键技术开发。
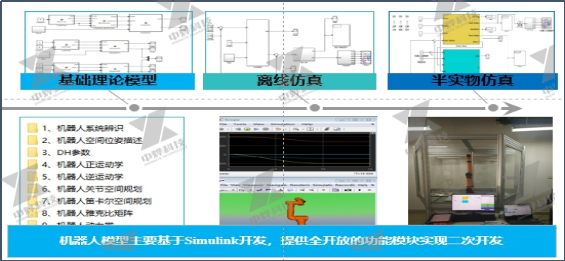
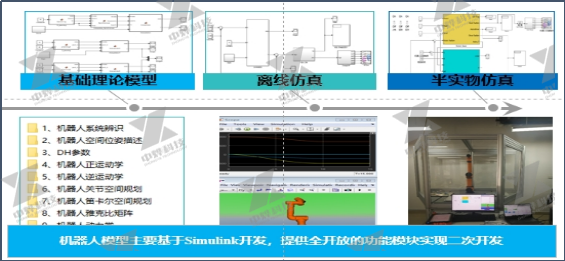
开发概图
适配教材
《机器人学导论》
《机器人控制技术》
《计算机控制技术》
《电机与伺服控制》
《机器人伺服驱动技术》
《机器人机电一体化技术》
《机器人操作系统》
《现代控制理论》
《机器人技术基础》
《运动控制》
《Matlab建模与仿真》
实验内容
(一)《机器人学》相关实验
机械臂运动学控制实验
1.机器人机械结构认知实验
2.驱动和控制系统认知实验
3.运动学基本知识实验
4.坐标系和DH参数设定
5.正运动学分析实验
6.逆运动学分析实验
7.正逆解实物控制实验
8.关节空间轨迹规划控制实验
9.笛卡尔空间轨迹规划控制实验
机械臂动力学控制实验
1.单关节PID算法正弦曲线跟踪实验
2.双关节PID算法正弦曲线跟踪实验
3.单关节自适应控制算法正弦曲线跟踪实验
4.单关节零力拖动实验
5.双关节零力拖动实验
机械臂伺服电机和驱动器实验
1.CAN总线通讯实验
2.单关节转矩控制实验
3.单关节PTP控制实验
4.单关节PT控制实验
(二)现代控制理论/智能控制相关实验
现代控制理论实验
1.控制系统状态变量认知实验
2.动力学建模控制实验
3.PID控制算法正弦曲线跟踪实验
智能控制理论
1.单关节PID智能算法正弦曲线跟踪控制实验
2.双关节PID智能算法正弦曲线跟踪控制实验
3.单关节自适应控制算法正弦跟踪控制实验
4.单关节零力拖动智能控制实验
5.双关节零力拖动智能控制实验
